Кинематические пары в теле человека
Кинематические пары в теле человека
Кинематические пары, применяемые в технике и распространенные в природе, имеют принципиально важное отличие.
В технических механизмах кинематические пары устроены обычно так, что возможны их лишь вполне определенные, заранее заданные плоские движения.
Кинематические пары в теле человека – это подвижные соединения двух костных звеньев, обеспечивающие их произвольные пространственные движения. Возможности движения кинематических соединений определяются скелетным строением тела и управляющим воздействием мышц.
Кинематические пары в теле человека принято называть биокинематическими. Из всех биокинематических пар при изучении двигательных действий человека специалистов интересуют прежде всего верхние и нижние конечности тела, представляющие собой – по принятой классификации – низшие вращательные кинематические пары.
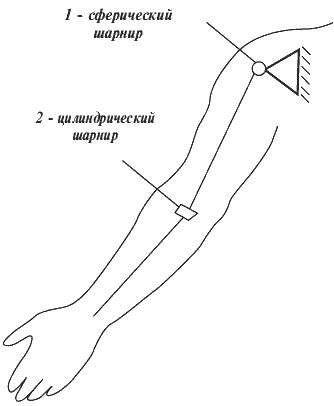
Рис. 17
На рис. 17 показана кинематическая модель верхней конечности человека. Шаровым шарниром 1 биокинематическая пара связана с туловищем; между собой звенья пары соединены цилиндрическим шарниром 2. Пространственные биокинематические пары конечностей могут быть замкнутыми или разомкнутыми. Они имеют постоянные и временные связи, которые и определяют, сколько и каких степеней свободы имеет данная рассматриваемая пара. Так, движения руки как разомкнутой биокинематической пары (рис. 18а) ограничены плечевым сочленением, исключающим линейные перемещения плеча 1 относительно туловища.
Ориентация руки в любой момент ее пространственного движения относительно туловища может быть описана пятью параметрами. Координаты xA, yA, zA (рис. 18б) определяют положение плеча 1, положение предплечья 2 относительно плеча задается углом ?2, поворот предплечья вокруг собственной оси – углом ?2.
Поворот предплечья на угол ?2 можно не учитывать, т. к. он не влияет на ориентацию руки в целом. При принятом допущении очевидно, что рука человека в общем случае имеет четыре степени свободы.
Фактическое же число степеней свободы руки зависит от ее ориентации в пространстве и ограничено пределами подвижности плечевого и локтевого суставов.
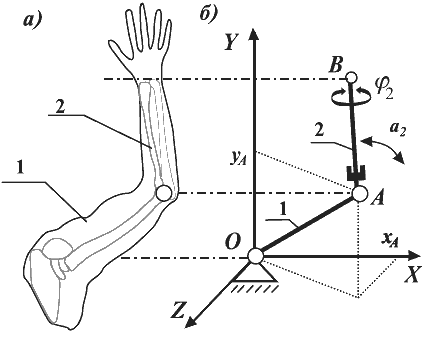
Рис. 18
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
6. ВО ИМЯ ЧЕЛОВЕКА, НА БЛАГО ЧЕЛОВЕКА
6. ВО ИМЯ ЧЕЛОВЕКА, НА БЛАГО ЧЕЛОВЕКА «И я знаю этого человека!» — хочется порой под стать герою одного из северных анекдотов воскликнуть во время иных матчей, когда болельщиков можно пересчитать по пальиам.На самом же деле нас, конечно, больше. Во много раз больше. Ведь не
1.2.1 Кинематические характеристики подтягивания. 1.2.1.1 Пространственные характеристики.
1.2.1 Кинематические характеристики подтягивания. 1.2.1.1 Пространственные характеристики. Нередко из-за неудачно выбранного исходного положения спортсмен на соревнованиях не может показать результат, который без труда демонстрирует на тренировках. Ненадёжный хват,
Кинематические пары
Кинематические пары Искусственно созданную механическую систему тел, предназначенную для преобразования движения, называют механизмом. Главной особенностью всякого механизма является определенность движения его частей. Для того чтобы любое тело двигалось
Плоские кинематические пары
Плоские кинематические пары Плоской называется кинематическая пара, все точки звеньев которой в относительном движении перемещаются в одной или в параллельных плоскостях.Плоские кинематические пары получили наибольшее распространение в технике; они проще, потому
Пространственные кинематические пары
Пространственные кинематические пары Кинематическая пара на каждой из координатных осей называется пространственной, если все точки ее звеньев в относительном движении описывают пространственные кривые.В любой момент пространственного движения положение отдельного
Кинематика движений человека
Кинематика движений человека В биомеханике под кинематикой движений понимают «геометрию», то есть пространственную форму движений человека без учета его массы и действующих сил. Кинематика дает в целом только внешнюю картину движений. Причины возникновения и
3.3. Нахождение важнейших точек ориентации на собственном теле
3.3. Нахождение важнейших точек ориентации на собственном теле Одни лишь теоретические знания анатомии едва ли помогут вам научиться ездить верхом. Чтобы оживить эту очень важную главу об анатомии, я рекомендовала бы вам сейчас надеть короткие тренировочные шорты,
5.3. Определение важнейших точек ориентации на теле
5.3. Определение важнейших точек ориентации на теле Вот и снова перед вами возникает вопрос, насколько хорошо вы знаете собственное тело. Прежде чем начать поиски важнейших точек, изучите себя перед зеркалом и ответьте себе:* Каковы контуры вашего плечевого пояса, он
6.3. Определение важнейших точек ориентации на собственном теле
6.3. Определение важнейших точек ориентации на собственном теле Важной точкой ориентации является верхняя передняя ость таза (рис. 6.8), вы уже находили ее, изучая главу о тазе. Она расположена на уровне тазобедренного сустава и поэтому очень важна для наблюдений за
Уровень человека
Уровень человека Другая черта, понравившаяся мне в Эде Робинсоне, проявилась сразу после нашей встречи. Мы сидели в кабинете спортзала, и я рассказывал о некоторых измерениях и фотографиях, которые я надеялся сделать в этот день. Например, я хотел тщательно измерить,
Расположение уязвимых точек на теле человека
Расположение уязвимых точек на теле человека К зонам, где находятся уязвимые точки корпуса, относятся промежность, солнечное сплетение, ребра, сердце, печень, селезенка, подмышки, почки, копчик.Через область промежности проходит много крупных сосудов и нервов, выше
Водное естество человека
Водное естество человека Одно из главных качеств, характеризующих хорошего ныряльщика на — это уровень его адаптации к водной среде, по сути, уровень «слияния» подводника с водой.В особенности, если речь идет об охотнике на задержке дыхания. Чем больше он сливается с
Глава третья. В здоровом теле – здоровый дух!
Глава третья. В здоровом теле – здоровый дух! 3.1. Стройная фигура на долгие годы Многокомпонентные блюда сложны в приготовлении, их калорийность возрастает в разы за счет содержания разных продуктов с порой несочетаемыми белками и углеводами. Даже, казалось бы,