Пространственные кинематические пары
Пространственные кинематические пары
Кинематическая пара на каждой из координатных осей называется пространственной, если все точки ее звеньев в относительном движении описывают пространственные кривые.
В любой момент пространственного движения положение отдельного звена как твердого тела определяется шестью независимыми координатами. Так, положение звена АВ (рис. 14) может быть задано координатами x1, y1, z1 любой его точки, например точки А, и тремя углами ?1, ?2, ?3 наклона звена к каждой из координатных осей. Вместо указанных углов бывает проще использовать три других независимых параметра-координаты x2, y2, z2 точки В.
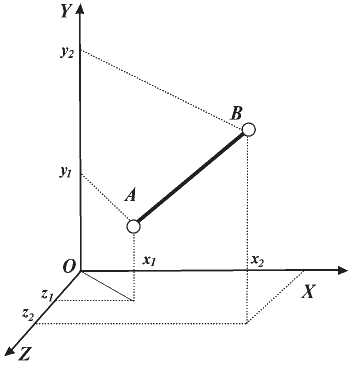
Рис. 14
Таким образом, звено АВ как свободно движущееся в пространстве твердое тело имеет шесть степеней свободы. Когда это звено войдет в кинематическую пару с другим таким же звеном, оно окажется уже не свободным (как отмечалось, на его относительное движение накладываются связи, уменьшающие число степеней свободы).
Пусть два звена – АВ длиной L1 и ВС длиной L2 – соединены в низшую вращательную кинематическую пару (рис. 15) цилиндрическим шарниром.
Положение данной системы звеньев в любой момент ее пространственного движения может быть задано семью независимыми координатами. Координаты x1, y1, z1 точки А и координаты x2, y2, z2 точки B определяют положение в пространстве звена АВ. Для определения относительного положения звена BС достаточно знать угол ?2. Это означает, что система имеет семь степеней свободы (но не двенадцать, как было до соединения звеньев в кинематическую пару).
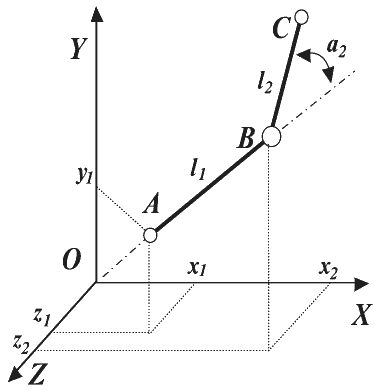
Рис. 15
Итак, соединение двух звеньев цилиндрическим шарниром в пространственную кинематическую пару отнимает у системы пять степеней свободы.
Если в рассмотренной кинематической паре ограничить подвижность звена АВ, например, зафиксировать точку А (рис. 16), совместив ее с началом координат, то положение такой системы в пространстве будет определяться четырьмя независимыми координатами x1, y2, z2, ?2. То есть данная кинематическая пара будет иметь всего четыре степени свободы.
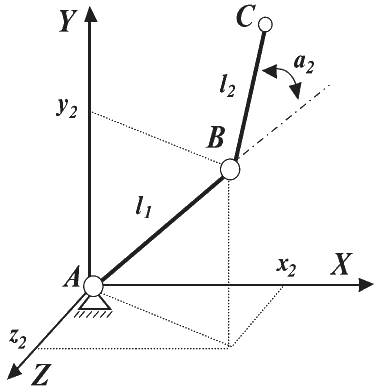
Рис. 16
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
1.2.1 Кинематические характеристики подтягивания. 1.2.1.1 Пространственные характеристики.
1.2.1 Кинематические характеристики подтягивания. 1.2.1.1 Пространственные характеристики. Нередко из-за неудачно выбранного исходного положения спортсмен на соревнованиях не может показать результат, который без труда демонстрирует на тренировках. Ненадёжный хват,
Кинематические пары
Кинематические пары Искусственно созданную механическую систему тел, предназначенную для преобразования движения, называют механизмом. Главной особенностью всякого механизма является определенность движения его частей. Для того чтобы любое тело двигалось
Плоские кинематические пары
Плоские кинематические пары Плоской называется кинематическая пара, все точки звеньев которой в относительном движении перемещаются в одной или в параллельных плоскостях.Плоские кинематические пары получили наибольшее распространение в технике; они проще, потому
Кинематические пары в теле человека
Кинематические пары в теле человека Кинематические пары, применяемые в технике и распространенные в природе, имеют принципиально важное отличие.В технических механизмах кинематические пары устроены обычно так, что возможны их лишь вполне определенные, заранее