Кинематика движений человека
Кинематика движений человека
В биомеханике под кинематикой движений понимают «геометрию», то есть пространственную форму движений человека без учета его массы и действующих сил. Кинематика дает в целом только внешнюю картину движений. Причины возникновения и изменения движений раскрывает динамика.
Положение тела человека в пространстве в биомеханике принято описывать его местоположением, ориентацией и позой.
Местоположение характеризует, в какой части пространства находится в данный момент человек.
Ориентация тела иллюстрирует его поворот относительно неподвижной системы координат (вверх головой, горизонтально, вниз головой, «кругом»).
Поза тела показывает взаимное расположение отдельных частей тела человека относительно друг друга.
Определение местоположения обычно не связано с большими трудностями. Чтобы определить местоположение человека как твердого тела, достаточно указать три координаты какой-либо точки тела в неподвижной системе координат Х1У1Z1 (рис. 19).
В качестве такой точки обычно выбирают центр масс (ЦМ) тела. В принятой системе координат местоположение тела определяется тремя координатами x1, y1, z1.
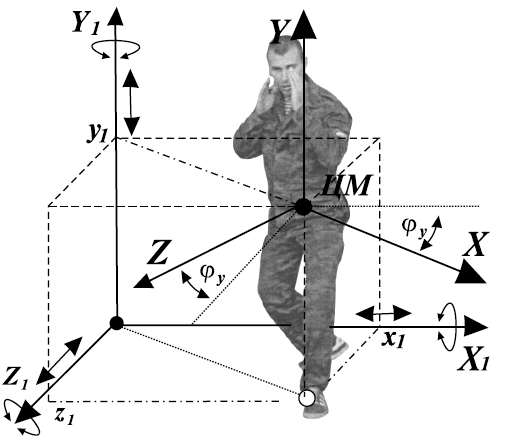
Рис. 19
Определение ориентации тела человека – задача гораздо более трудная, особенно при сложных позах.
Прежде чем показать пути ее решения, остановимся на том, как определяются основные оси и плоскости человеческого тела.
Оси тела образуют так называемую связанную систему координат XYZ, начало отсчета которой совмещают с центром масс (ЦМ) тела.
Для того чтобы изменение ориентации связанной системы точнее отражало изменение ориентации тела в пространстве, направление продольной оси определяют так. Тело человека (в стойке руки вверх) делится горизонтальной плоскостью на две равные по весу половины. Линия, соединяющая центры масс верхней и нижней половин тела (и проходящая через общий ЦМ), и есть продольная ось тела. В основной стойке эта ось практически близка к вертикальной.
Поэтому продольную ось тела ОY (рис. 19) направляют вертикально; ось ОХ проводят горизонтально и называют фронтальной; ось OZ направляют перпендикулярно первым двум осям и называют глубинной. Оси связанной системы первоначально ориентированы так же, как и оси неподвижной системы. При повороте (вращении) тела вместе с ним относительно неподвижной системы поворачивается и связанная система координат.
Таким образом, ориентацию тела в пространстве характеризуют три угловых координаты ?x, ?y, ?z (так называемые углы Эйлера).
Заметим, что при сложных позах положение ЦМ может выходить за пределы тела.
В биомеханике с целью облегчить описание движений человека (в частности, при выполнении отдельных элементов упражнений, приемов и т. д.) вводят понятия плоскостей тела.
Основные плоскости тела (рис. 20) и всякие другие, параллельные им, ориентированы в системе трех взаимно перпендикулярных осей тела.
Вертикальная плоскость YОХ, проходящая через ЦМ и разделяющая тело на переднюю и заднюю части (а также всякая параллельная ей плоскость), называется фронтальной.
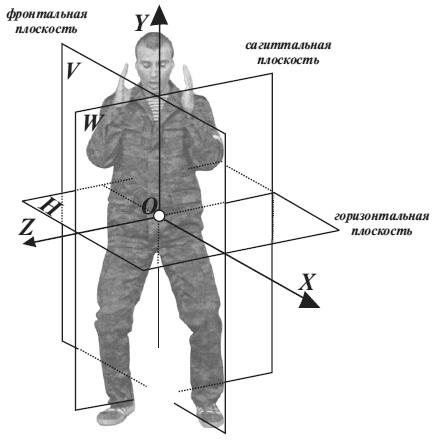
Рис. 20
Вертикальная плоскость YOZ, проходящая через ЦМ и разделяющая тело на левую и правую части, называется глубинной (а также продольной, сагиттальной). Горизонтальная плоскость ХOZ, проходящая через ЦМ и разделяющая тело на верхнюю и нижнюю части, называется поперечной (горизонтальной, трансверсальной). При описании двигательных действий человека движения его тела описываются соответственно в указанных основных или параллельных им плоскостях.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
6. ВО ИМЯ ЧЕЛОВЕКА, НА БЛАГО ЧЕЛОВЕКА
6. ВО ИМЯ ЧЕЛОВЕКА, НА БЛАГО ЧЕЛОВЕКА «И я знаю этого человека!» — хочется порой под стать герою одного из северных анекдотов воскликнуть во время иных матчей, когда болельщиков можно пересчитать по пальиам.На самом же деле нас, конечно, больше. Во много раз больше. Ведь не
Экономия движений
Экономия движений Существует наилучший способ решения каждой задачи. Наиболее важные принципы совершенствования движений следующие:1. Для преодоления сопротивления необходимо использовать силу энергии.2. Сила энергии должна быть сведена к минимуму, если ее необходимо
4.2.3. Оптимизация движений
4.2.3. Оптимизация движений При рассмотрении действий в рукопашном бою необходимо учитывать следующие правила экономии движений:– при работе двумя руками движения их должны быть по возможности одновременными, симметричными и противоположными по направлению.
Естественность движений
Естественность движений Давайте внимательно вчитаемся в строки, сказанные одним из окинавских мастеров: «Сёрин Рю… является естественным стилем, как ходьба по дороге». Я нахожу в этих словах еще один скрытый критерий правильной техники. Можно предположить, что
Биомеханическое описание движений человека
Биомеханическое описание движений человека В анатомии человека для описания поз и, соответственно, движений в суставах используют специфические термины (сгибание-разгибание, отведение-приведение, пронация-супинация). Эта терминология чисто описательная: «сгибание
Оптимизация движений
Оптимизация движений При рассмотрении действий в рукопашном бою необходимо учитывать следующие правила экономии движений:– при работе двумя руками движения их должны быть по возможности одновременными, симметричными и противоположными по направлению.
2.2. Количественные характеристики движений
2.2. Количественные характеристики движений Все двигательные действия в спортивной борьбе могут быть описаны кинематическими характеристиками и динамическими параметрами (схема 2.1., 2.2.).Схема 2.1.Кинематические составляющие движений Поскольку основная задача в
ПРОГРАММИРОВАНИЕ ДВИЖЕНИЙ
ПРОГРАММИРОВАНИЕ ДВИЖЕНИЙ Так уж мы устроены: каждый раз, перед тем как выполнить какое-либо движение, мы мысленно представляем его.Когда движение нам хорошо знакомо, когда оно привычно, а тем более автоматизированно, мы обычно не замечаем, что перед выполнением в нашем
3.2. Количественные характеристики движений
3.2. Количественные характеристики движений В связи с тем, что в основе дзюдо лежит принцип парирования атаки противника, биомеханические основы ударной техники в настоящей главе описываться не будут.Все двигательные действия в видах спортивной борьбы могут быть описаны