Модельное представление человека
Модельное представление человека
Человека, как любое физическое тело, в зависимости от поставленных задач исследования можно рассматривать как материальную точку, как твердое тело или как связанную биомеханическую систему тел.
Как материальную точку человека рассматривают тогда, когда его перемещения намного больше собственных размеров тела и когда не исследуют движения отдельных частей тела и его вращение. Например, при прыжке с парашютом (рис. 5) парящий под куполом человек может рассматриваться как точка, положение которой в неподвижной системе координат XYZ определяется тремя независимыми координатами х1, у1, z1. То есть в данном случае человек обладает тремя степенями свободы.
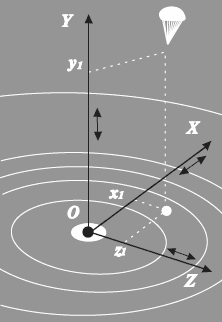
Рис. 5
Человека рассматривают как твердое тело конечных размеров тогда, когда важно учитывать не только его местоположение в пространстве, но и ориентацию тела (в частности, при изучении условий статического равновесия человека, а также его вращения в постоянной позе). Так, парашютист, выполняющий в затяжном прыжке элементы воздушной акробатики, перемещается в пространстве относительно неподвижной (земной) системы координат ХYZ. При этом ось OY направлена по нормали к поверхности Земли, ось ОХ – по касательной к горизонту, ось OZ – перпендикулярно первым двум осям.
Положение осей связанной системы xyz, а следовательно, и повороты парашютиста в земной системе координат, определяются тремя углами: ?х, ?y, ?z. То есть парашютист, выполняя акробатические фигуры, может совершать повороты вокруг каждой из осей.
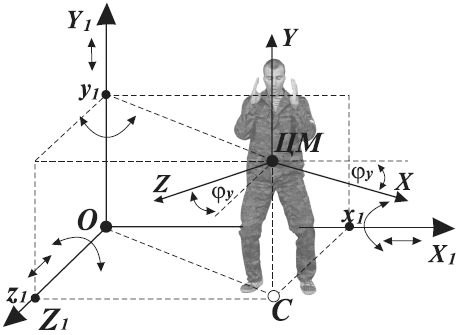
Рис. 6
Например, при выполнении фигуры «сальто» вращение тела происходит относительно постоянно ориентированной в пространстве фронтальной оси тела ох (см. рис. 7).
При выполнении «сальто с поворотом» тело парашютиста вращается одновременно относительно, по меньшей мере, двух осей. Первая из них (например, ох) имеет постоянную ориентацию, вторая (к примеру, продольная ось тела оy) изменяет свою ориентацию в пространстве.
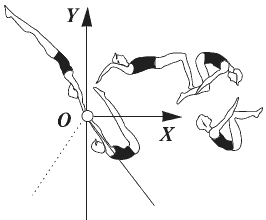
Рис. 7
Итак, в свободном полете человек как твердое тело конечных размеров имеет шесть степеней свободы.
Линейные перемещения человека в рукопашном бою определяются изменением координат х1, у1, z1 его ЦМ (рис. 6) в неподвижной системе х1, у1, z1. Повороты тела относительно ЦМ измеряются тремя углами: ?х, ?y, ?z. Так, например, положение осей ОХ и OZ связанной системы координат ХYZ на приведенном рисунке определяется поворотом тела человека вокруг вертикальной оси ОY на угол ?y.
При отклонениях продольной оси тела от вертикали во фронтальной или глубинной плоскостях тела происходит поворот тела вокруг осей OZ1 или ОХ1 соответственно.
Опорная поверхность Х1OZ1 является связью, ограничивающей перемещения тела вдоль оси OY1.
Таким образом, рукопашник, стоящий на выпрямленных ногах, имеет пять степеней свободы: перемещения вдоль осей ОХ1, ОZ1 и вращения вокруг координатных осей ОХ1, ОY1, ОZ1. Согнув ноги в коленях (приняв боевую стойку), рукопашник приобретает дополнительную ограниченную степень свободы перемещения вдоль оси ОY1.
В общем случае в рукопашном бою каждая связь, ограничивающая перемещения тела, уменьшает число степеней свободы.
1. Фиксация одной точки тела противника сразу лишает его трех степеней свободы – линейных перемещений вдоль трех основных координатных осей.
2. Закрепление двух точек тела приводит к образованию оси, проходящей через эти точки. В этом случае у тела остается лишь одна степень свободы: вращение относительно данной оси.
3. Закрепление третьей точки, не лежащей на этой оси, полностью лишает противника свободы движений.
Число связей, а следовательно, число степеней свободы может изменяться в процессе выполнения двигательного действия! Например, гимнаст, выполняющий махи на перекладине (рис. 7), обладает всего лишь одной степенью свободы вынужденного движения относительно оси OZ – оси перекладины. При выполнении соскока «дугой с сальто» спортсмен имеет три степени свободы (дополнительные две – в плоскости ХОY). А при соскоке «сальто с поворотом» число степеней свободы возрастает до шести (в зависимости от сложности вращения).
И парашютист, выполняющий акробатические фигуры, и гимнаст, совершающий головоломный соскок, совершают сложные движения. Оба, управляя своим телом, меняют позу. Но в обоих случаях важно проследить за изменением ориентации тела в пространстве, не принимая во внимание взаимные перемещения частей тела. Этим оправдано модельное представление человека как твердого тела.
И, наконец, человека следует рассматривать как связанную систему тел, когда, кроме положения и ориентации человека в пространстве, важно знать взаимное расположение отдельных частей тела относительно друг друга. Это в одинаковой мере относится ко многим видам спортивной двигательной деятельности.
Описание выведения человека из состояния равновесия весьма затруднительно без учета движения всех частей тела. Тут уже, с точки зрения механики, речь идет о представлении тела человека как тела переменной конфигурации. При такой постановке вопроса для описания движений человека должно использоваться соответствующее модельное представление, которое учитывало бы особенности движения отдельных взаимосвязанных частей тела, влияющих на выполнение двигательного действия.
Такой моделью может служить рассматриваемая в дальнейшем связанная биомеханическая система тел.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
6. ВО ИМЯ ЧЕЛОВЕКА, НА БЛАГО ЧЕЛОВЕКА
6. ВО ИМЯ ЧЕЛОВЕКА, НА БЛАГО ЧЕЛОВЕКА «И я знаю этого человека!» — хочется порой под стать герою одного из северных анекдотов воскликнуть во время иных матчей, когда болельщиков можно пересчитать по пальиам.На самом же деле нас, конечно, больше. Во много раз больше. Ведь не
322. Энергетические врата человека
322. Энергетические врата человека Основным энергетическим хранилищем является нижний Дан-Тиен, «мозг живота». Вы можете его почувствовать. Разделите область живота от пупка до лобка на 5 частей.Нижний Дан-Тиен находится во второй части от лобка, или в четвертой части от
Современное представление о тактике
Современное представление о тактике Тактика – это раздел теории бокса, в котором изучаются формы, виды, способы и средства борьбы с различными по манере ведения боя противниками. Тактическое мастерство боксера проявляется в способности нейтрализовать сильные стороны
Параграф 6. Детские представление о будущих занятиях в секции
Параграф 6. Детские представление о будущих занятиях в секции Любой ребенок, родитель, тренер-преподаватель имеет свое представление о занятиях в секции тхэквондо. Его образы сформированы разговорами близких, просмотром телевизионных передач, рекламных роликов. Из
Современное представление о тактике
Современное представление о тактике Тактика – это раздел теории бокса, в котором изучаются формы, виды, способы и средства борьбы с различными по манере ведения боя противниками. Тактическое мастерство боксера проявляется в способности нейтрализовать сильные стороны
4.2.4. Ритм и деятельность человека
4.2.4. Ритм и деятельность человека Ритм является кардинальным свойством природы, формой движения материи. В нашей стране пионером хронобиологии был ленинградский физиолог К. Я. Пэрна. Он раскрыл ритмическую структуру психоэмоциональной жизни человека и показал значение
4.4.4. О состоянии человека в рукопашном бою
4.4.4. О состоянии человека в рукопашном бою Воинское дело есть трудное, скорбное и трагическое, но необходимое и служащее благой цели. Средства его жесткие и неправедные. Но именно поэтому дух, коему вручаются эти средства, должен быть крепок и непоколебим в своем
О состоянии человека в рукопашном бою
О состоянии человека в рукопашном бою Состояние человека в рукопашном бою определяется многими причинами, целой гаммой чувств. Это чувство воодушевления и чувство страха, чувство физической и душевной усталости и т. д. Голод, недостаток сна, непогода и многое другое –
Кинематика движений человека
Кинематика движений человека В биомеханике под кинематикой движений понимают «геометрию», то есть пространственную форму движений человека без учета его массы и действующих сил. Кинематика дает в целом только внешнюю картину движений. Причины возникновения и
Биомеханическая модель человека
Биомеханическая модель человека Биомеханика изучает в опорно-двигательном аппарате человека преимущественно те особенности его строения и функций, которые имеют значение для совершения (и совершенствования) движений.При самом упрощенном подходе перемещение человека
Ритм и деятельность человека
Ритм и деятельность человека Ритм является кардинальным свойством природы, формой движения материи. В нашей стране пионером хронобиологии был ленинградский физиолог Н. Я. Пэрна. Он раскрыл ритмическую структуру психоэмоциональной жизни человека и показал значение
Уровень человека
Уровень человека Другая черта, понравившаяся мне в Эде Робинсоне, проявилась сразу после нашей встречи. Мы сидели в кабинете спортзала, и я рассказывал о некоторых измерениях и фотографиях, которые я надеялся сделать в этот день. Например, я хотел тщательно измерить,
Влияние Луны на человека
Влияние Луны на человека Итак, воздействие Луны на Землю не ограничивается только лишь созданием приливной волны, огибающей земной шар вслед за ночным светилом. Вся природа реагирует на изменения, происходящие с Луной, и человек, как органичная часть живого мира, не
4.2. Общее представление об интеллекте, соотношение видов интеллекта
4.2. Общее представление об интеллекте, соотношение видов интеллекта Человек должен верить, что непонятное можно понять: иначе он не стал бы размышлять о нем. И. Гете Технология развития интеллектуальных способностей у подростков-спортсменов основывается прежде всего на
6.6. Обобщенное представление об эмоционально-волевом компоненте интеллектуальной готовности подростка-спортсмена
6.6. Обобщенное представление об эмоционально-волевом компоненте интеллектуальной готовности подростка-спортсмена … Но без души и помыслов высоких Живых путей от сердца к сердцу нет. И. Гете «Фауст» Реализация интеллектуальных способностей подростка в условиях