Биомеханическая модель человека
Биомеханическая модель человека
Биомеханика изучает в опорно-двигательном аппарате человека преимущественно те особенности его строения и функций, которые имеют значение для совершения (и совершенствования) движений.
При самом упрощенном подходе перемещение человека рассматривают как движение его общего ЦМ. В этом случае можно проследить лишь за перемещением тела человека в целом, оценить в известной мере общий итог его двигательной деятельности. Но остается неизвестным, в результате каких именно движений достигнуто перемещение общего ЦМ.
Учет особенностей движения отдельных звеньев тела позволяет более точно рассмотреть и перемещение человека в целом.
В первом приближении в биомеханике отвлекаются от деталей анатомического строения и физиологических механизмов опорно-двигательного аппарата и рассматривают упрощенную (рабочую) модель человека.
При этом стремятся, чтобы эта биомеханическая модель обладала основными свойствами, присущими моделируемому объекту, и обеспечивала бы использование современных методов исследования, в том числе применение аппарата теоретической механики.
При построении рабочей модели человека в биомеханике делают, как правило, следующие допущения:[5]
• Звенья модели (части тела человека) абсолютно твердые, то есть не деформируются ни при каких обстоятельствах.
• Геометрические параметры и масса звеньев модели (их длина и пр.) совпадают с соответствующими параметрами сегментов тела человека.
• Звенья модели соединены в идеальные кинематические пары сферическими (шаровыми) или цилиндрическими шарнирами.
При принятых упрощающих допущениях рабочая модель человека, представленная на рисунке 35, включает девять звеньев туловища и конечностей.
Туловище моделируется как одно жесткое звено, образованное верхней и нижней траверсами, которые соединены между собой продольным элементом.
Конечности человека представляют как замкнутые или разомкнутые кинематические пары, соединенные с туловищем шаровыми шарнирами. Считают, что звенья кинематических пар между собой соединены цилиндрическими шарнирами.
Для совпадения геометрических параметров модели с соответствующими параметрами сегментов человека шарниры модели совмещают с шарнирами скелета человека.
Модели такого типа нашли широкое применение в биомеханике и получили название базовых моделей. При исследовании движений человека они давно используются многочисленными авторами, начиная с Бернштейна Н. А. Известны труды многих исследователей (Донского Д. Д., Зациорского В. М. и др.), которыми накоплен богатый экспериментальный материал по определению геометрических и массовых параметров при моделировании человека.
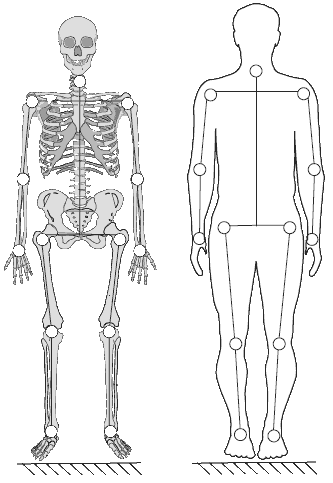
Рис. 35
Американской службой NАSА[6] на основании антропологических исследований большого количества людей получены экспериментальные данные о геометрических параметрах и положении ЦМ отдельных частей тела «среднего» человека.
Суммарное число степеней свободы биомеханической модели человека, как правило, больше шести. Его определяет наличие разомкнутых кинематических цепей, в основном верхних конечностей. В пределах подвижности сочленений с туловищем они могут иметь по четыре степени свободы (рис. 6).
Определяющим фактором является поза человека – взаимное расположение отдельных сегментов тела относительно друг друга. При изменении позы суммарное число степеней свободы изменяется, так как новой позе соответствует новое модельное представление человека.
В позе, соответствующей боевой стойке (рис. 6), биомеханическая модель имеет четырнадцать степеней свободы – (6+4+4).
В процессе выполнения двигательного действия разомкнутая цепь внезапно может получить связь в виде опоры или захвата, что резко ограничивает свободу движений. Следовательно, число степеней свободы биомеханической модели человека может изменяться в широком диапазоне.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
6. ВО ИМЯ ЧЕЛОВЕКА, НА БЛАГО ЧЕЛОВЕКА
6. ВО ИМЯ ЧЕЛОВЕКА, НА БЛАГО ЧЕЛОВЕКА «И я знаю этого человека!» — хочется порой под стать герою одного из северных анекдотов воскликнуть во время иных матчей, когда болельщиков можно пересчитать по пальиам.На самом же деле нас, конечно, больше. Во много раз больше. Ведь не
6.1. Модель пространственно-смысловой технико-тактической деятельности в тхэквондо и методология многолетней технико-тактической подготовки тхэквондистов
6.1. Модель пространственно-смысловой технико-тактической деятельности в тхэквондо и методология многолетней технико-тактической подготовки тхэквондистов 6.1.1. Вопросы моделирования в спорте По вопросам моделирования в спорте вообще ведущее место занимают работы Б. М.
6.1.2. Модель пространственно-смысловой деятельности тхэквондиста
6.1.2. Модель пространственно-смысловой деятельности тхэквондиста Прежде чем вести разговор о функциональных моделях тхэквондиста, прежде необходимо обратиться к модели пространственно-смысловой специфической деятельности через требование: «минимумом технических
Ритм и деятельность человека
Ритм и деятельность человека Ритм является кардинальным свойством природы, формой движения материи. В нашей стране пионером хронобиологии был ленинградский физиолог Н. Я. Пэрна. Он раскрыл ритмическую структуру психоэмоциональной жизни человека и показал значение
Глава 6. Модель пространственно-смысловой деятельности в спортивной борьбе и этапы многолетней технико-тактической подготовки в греко-римской борьбе
Глава 6. Модель пространственно-смысловой деятельности в спортивной борьбе и этапы многолетней технико-тактической подготовки в греко-римской борьбе По вопросам моделирования в спорте ведущее место занимают работы Б.М. Шустина (1975; 1979; 1995).Так, например, в его работе от 1979
6.1. Модель пространственно-смысловой технико-тактической деятельности в греко-римской борьбе
6.1. Модель пространственно-смысловой технико-тактической деятельности в греко-римской борьбе В переложении на правила соревнований по греко-римской борьбе, интегральный блок пространственно-смысловой деятельности состоит из четырех разделов (вместо пяти для других
10.1. Модель функциональной обеспеченности борца
10.1. Модель функциональной обеспеченности борца В двух предыдущих главах шел разговор о технике и тактике борьбы. Однако технические и тактические умения реализуются за счет использования функциональных возможностей организма, в состав которых входят:– качество
Уровень человека
Уровень человека Другая черта, понравившаяся мне в Эде Робинсоне, проявилась сразу после нашей встречи. Мы сидели в кабинете спортзала, и я рассказывал о некоторых измерениях и фотографиях, которые я надеялся сделать в этот день. Например, я хотел тщательно измерить,
9.3. Модель пространственно-смысловой деятельности в спортивной борьбе и этапы многолетней технико-тактической подготовки в борьбе дзюдо
9.3. Модель пространственно-смысловой деятельности в спортивной борьбе и этапы многолетней технико-тактической подготовки в борьбе дзюдо Во всех странах, культивирующих дзюдо, производится оценка технического мастерства не так, как в бывшем СССР и в настоящей России (по
9.3.2. Модель пространственно-смысловой технико-тактической деятельности в борьбе дзюдо
9.3.2. Модель пространственно-смысловой технико-тактической деятельности в борьбе дзюдо Прежде чем вести разговор о функциональных моделях борца, необходимо обратиться к модели пространственно-смысловой специфической деятельности через требование: «минимумом
12.3. Модель функциональной обеспеченности борца и поэтапные задачи ее развития
12.3. Модель функциональной обеспеченности борца и поэтапные задачи ее развития В двух предыдущих главах шел разговор о технике и тактике борьбы. Однако технические и тактические умения реализуются за счет использования функциональных возможностей организма, в состав
Влияние Луны на человека
Влияние Луны на человека Итак, воздействие Луны на Землю не ограничивается только лишь созданием приливной волны, огибающей земной шар вслед за ночным светилом. Вся природа реагирует на изменения, происходящие с Луной, и человек, как органичная часть живого мира, не
Глава 2 Новая модель карьеры гонщика: место в кокпите с помощью уловок, кредитов и спонсоров
Глава 2 Новая модель карьеры гонщика: место в кокпите с помощью уловок, кредитов и спонсоров В начале 70-х годов появилось то, что в наше время является чем-то само собой разумеющимся: покупка гонщиком места в кокпите. Мне кажется, первым, кто в Формуле 1 купил себе пару
Глава 38 Выездная модель
Глава 38 Выездная модель А для начала – даже еще дальше. Помните, как на Политбюро рассматривался вопрос о возвращении футболистов сталинградского «Трактора» Пономарева и Проворнова из столичных «Динамо» и ЦДКА в родную команду? А как и за что Сталин наказал Старостина? А
Медленноуглеводная диета и 194 человека
Медленноуглеводная диета и 194 человека Представленные далее данные по медленноуглеводной диете были собраны с помощью подробных опросников на сайте CureTogether.com. На все вопросы ответило 194 человека, 58 % указали, что эта диета стала первой, которой им удалось строго